|
|
|
 |
|
| Voyons
ŗ prťsent la propulsion ťlectrique installťe dans ce kit
"ARF" et ťgalement dans celui "RTF" :
le contrŰleur supportant un courant maximal de 18 A, ainsi
que le moteur brushless ŗ cage tournante sont dťjŗ
prťinstallťs... |
|
|
|
|
|
 |
|
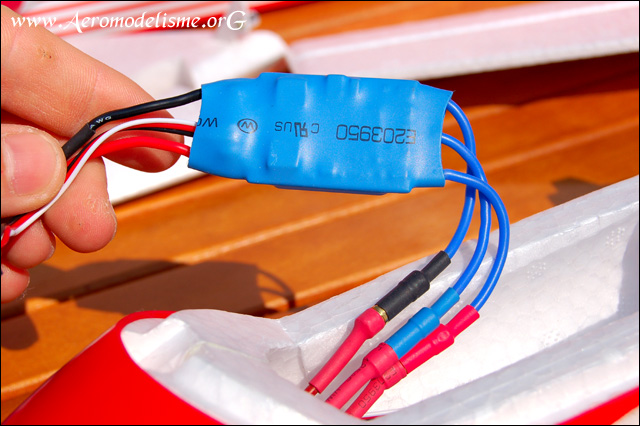
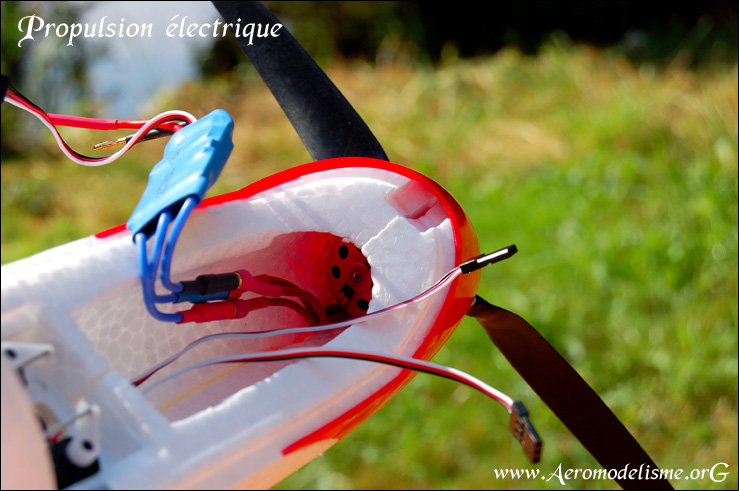
| 1) En
retirant la verriŤre, on dťcouvre le moteur brushless ŗ cage tournante
sur lequel est reliť ťlectriquement par trois conducteurs le contrŰleur
Robbe de 18 A max. |
|
| La
propulsion installťe ŗ bord de l'ASW 15 par Robbe |
| Le tableau
rťcapitulatif ci-dessous rťsume simplement et efficacement les
composants installťs du systŤme de propulsion, ŗ bord de notre ASW 15.
Il est ŗ noter que les prises sont soudťes et que peu de travail est
nťcessaire, si ce n'est immobiliser le contrŰleur ŗ l'aide de deux
bandes velcro aprŤs
l'avoir reliť au rťcepteur sur la bonne voie (dans notre cas la nį3), ainsi que l'accu Lipo. Dans
notre ťquipe, certains avaient un regard curieux, mais plus
que mťfiant sur cet ťquipement. Il faut dire que le contrŰleur,
certainement d'origine chinoise (cela ne signifie pas qu'il n'est pas
fiable!), est juste identifiť par une ťtiquette collťe et nous avons
aucune information sur ces caractťristiques prťcises ! Idem, pour le
moteur agrťable ŗ la vue avec sa couleur rose, mais pas plus de
renseignement sur celui-ci non plus ! Ces deux composants permettent une
rťduction du coŻt de production de ce kit pour le fabricant, quand ŗ nous cela ne se
voit guŤre sur la facture. Espťrons que tout
fonctionne durablement et efficacement. Un des points positifs, ťtant la
simplicitť de mise en oeuvre : pas de programmation difficile ŗ faire,
tout est prťrťglť. On branche et Áa fonctionne ! Nous nous demandons
cependant oý placer l'accu Lipo ? |
|
|
|
|
Les
composants du "Set de propulsion" |
| Equipements
... |
Quantitťs |
Descriptions,
caractťristiques, utilitťs... |
| Moteur
brushless LRK |
1 |
Les
connecteurs sont dťjŗ soudťs...
Caractťristiques
techniques du moteur pouvant Ítre utilisť pour remplacement et
similaire :
-
Marque : Robbe
-
Rťfťrence : 2827-26
-
Type : Brushless ŗ cage tournante (LRK)
-
Nombre de pŰles : 14
-
Nombre d'ťlťments Lithium recommandť : 2 - 3
-
Nombre d'ťlťments Ni-Cd / Ni-Mh recommandť : 6 - 10
-
Intensitť dťlivrťe en continu : 6 - 10 A
-
Intensitť maximale durant 60 secondes : 12 A
-
Rťsistance interne : ?
-
KV : 930 Rpm/Volts
-
Taille de l'hťlice recommandťe : 7x4 - 8x5
-
Rendement maximal : 78 %
-
Puissance utile : 110 Watts
-
Poussťe maximale : 820 g.
-
Poids du modŤle maximal : 800 g.
-
Poids total (inclus connecteurs) : 57 g.
-
Dimensions : 28,8 x 29 mm.
-
DiamŤtre de l'arbre : 3,17 mm.
-
Entre-axes : 19 / 16 mm
-
Prises : PK 3,5 mm
-
Accessoires livrťs : Vis de fixation M3, support moteur,
adaptateurs d'hťlice (possibilitť d'inverser le moteur).
-
Domaines d'applications : vol lent, planeur < 2m ...
-
Prix : compris dans celui du kit (moteur similaire est celui
indiquť ici).
|
| ContrŰleur |
1 |
Les
connecteurs sont mis en place, il n'y aura plus qu'a l'agencer et le
programmer.
Caractťristiques
techniques du contrŰleur pouvant Ítre utilisť pour remplacement
et similaire
:
-
Marque : Robbe
-
Rťfťrence : Roxxy Air Control 818
-
Fonctions : Marche Avant / ArrÍt / Frein
-
Courant moteur : 18 A
-
Type et nombre d'accumulateurs : 6 ŗ 10 en Ni. ou 2 ŗ 3 Lipo (uniquement
les accus de type "Lipo" pour le contrŰleur inclus dans
le kit).
-
B.E.C. : 4 servos standards (6 ŗ 10 Ni.) ; 2 servos (10 Ni.) ; 4
servos (2 Lipo.) ; 2 servos (3 Lipo.).
-
Programmation : par "bips" (aucune
programmation accessible sur le contrŰleur inclus dans le kit).
-
Prises : PK 3,5 / 2 mm
- Dimensions : 21 x 16 x 7 mm.
-
Poids : 13 g.
-
Prix : compris dans celui du kit (contrŰleur similaire est celui
indiquť ici).
|
| Batterie |
1 |
Comme
toujours sur ce type de batterie, la prise d'ťquilibrage permet
d'obtenir des tensions similaires sur chaque ťlťment, et il faut
donc l'utiliser durant la charge!
Caractťristiques
techniques de la batterie recommandťe :
-
Type : Lipo
-
Fabricant : ťtiquette "Robbe"
-
Rťfťrence : 4828
-
Nombre d'ťlements : 3
-
Tension nominale : 11,1 V.
-
Capacitť : 950 mAh
-
Intensitť dťlivrťe en continu : 20 C, soit 19 A.
-
Intensitť
maximale dťlivrťe : 25 C, soit 23 A pendant quelques secondes
-
Charge : ŗ 1 C (soit 0,95 A)
-
Type de prise d'ťquilibrage : Robbe
-
Prises de puissance : PK 2 mm
-
Dimensions : 20 x 35 x 75 mm
-
Poids : 92 g.
-
Prix : ŗ partir de 45 Euros environ.
|
| Hťlice |
1 |
Inclus
le cŰne de 48 / 50 mm, support pales ..
Caractťristiques
techniques :
-
Marque : Robbe ?
-
Rťfťrence : 31950004
-
Taille : 9,5 x 5
-
Prix : compris dans le kit. En vente seule : 9 Euros environ.
|
|
|
|
|
|
|
|
|
|
|
2)
Le moteur brushless ŗ cage tournante est dťjŗ installť : d'origine
chinoise ?
3)
Le contrŰleur inclus dans le kit a des performances similaires au Robbe "Roxxy Air Control 818",
mais il ressemble ici ŗ un produit chinois avec le tampon "Robbe".
Il n'est pas possible de le programmer et il doit Ítre utilisť
uniquement avec un accu "Lipo" !
4)
Les gaines thermorťtractables recouvrant les connecteurs, sont mal
positionnťes et trop courtes selon nous (trop de mťtal en vue). |
|
|
Un
nez supplťmentaire ? Si vous souhaitez faire ťvoluer le modŤle sans moteur,
il est possible de remplacer le cŰne et l'hťlice ŗ pales rabattables par le nez
supplťmentaire inclus dans le kit. Le nouveau cŰne sera donc fixe et
maintenu par deux vis (la procťdure est dťtaillťe sur la page 9 de la
notice principale). Il faudra lancer le modŤle par sandow, ou au mieux le
faire remorquer par un avion destinť principalement ŗ cet usage. |
|
|
|
|
|
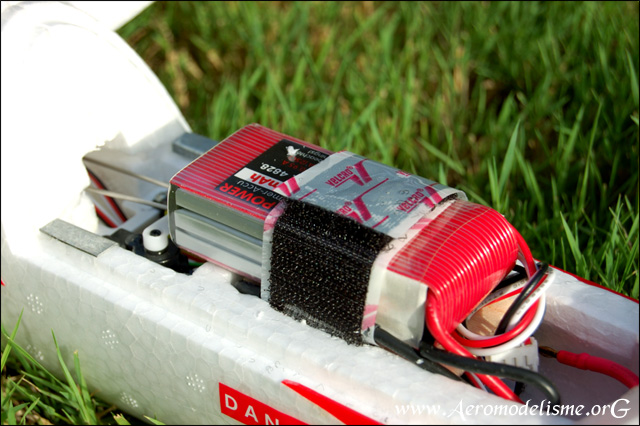
5)
L'accu Lipo recommandť par le fabricant : il est possible d'utiliser
d'autres accus, ce que nous verrons au fil des vols ...
6)
Nez de remplacement contenu sans le sachet plastique, que nous
n'utiliserons pas dans notre cas, prťfťrant conserver la propulsion
ťlectrique payťe ŗ l'achat du kit !
7)
Pour ťviter un court-circuit au niveau des trois conducteurs ťtablissant
la liaison du contrŰleur vers le moteur, il vaut mieux rajouter de la
gaine thermorťtractable sans la chauffer, sur deux connexions au minimum.
On notera que les gaines sur les connecteurs sont trop courtes (trop de mťtal en
vue), comme nous l'avons mentionnť dans une autre lťgende. |
|
| Mise en
place du contrŰleur et rťcepteur, ainsi que de l'accu Lipo |
|
J'ai
pu voir une installation ŗ bord d'un ASW15 : un vťritable nid conduisant
ŗ des ennuis certains ! Rappelons clairement que des fils entortillťs ne
font pas bon mťnage ! Il vaut mieux perdre quelques minutes ŗ ranger
correctement les fils et ŗ installer les ťquipements au lieu de tout
mettre en vrac, ce qui conduira ŗ des problŤmes frťquents : risque de
frottements des fils sur la cage tournante du moteur brushless, de mÍme les gaines mťtalliques qui frottent et finissent par polir les c‚bles
des servos, des problŤmes d'interfťrences peuvent apparaÓtre
(rťcepteur et contrŰleur trop proche, fils de puissance entortillťs
avec ceux de commande).
Le
fuselage de l'ASW15 permet de ranger convenablement le contrŰleur
et le rťcepteur, mais l'accu Lipo trouvera difficilement sa place et sera
comprimť. Si vous le placez en "sandwich", la circulation de
l'air en sera diminuťe, d'oý le contrŰleur chauffera de plus en plus,
et transmettra son ťnergie dissipťe ŗ l'accu (ou l'inverse) et le
rťcepteur qui lui ne demande rien, devra travailler dans des conditions
extrÍmes et non recommandťes ! Pour ťviter cela nous proposons un
systŤme qui permet de solutionner en partie ce problŤme. Mais voyons
tout d'abord la mise en place du contrŰleur et rťcepteur : ils seront
placťs de chaque cŰtť du fuselage et ŗ l'apposť, immobilisťs par des
bandes Velcro (voir sur notre photographie nį8). Vous pouvez ťgalement
attacher les c‚bles ŗ l'aide d'une gaine ouverte (photo nį11), et vous
obtiendrez ainsi une installation propre.
|
|
|
|
|
|
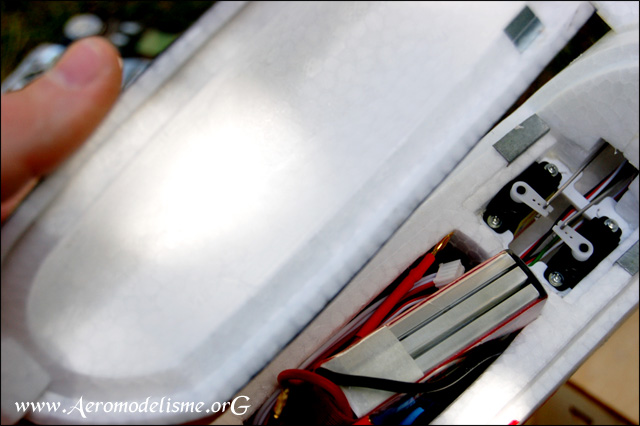
8)
Le rťcepteur installť ŗ gauche, ainsi que le contrŰleur ŗ droite :
attention que les c‚bles ne frottent au moteur.
9)
Il y a trop peu de place pour l'accu Lipo, celui-ci est trop compressť.
10)
Un support a ťtť rťalisť afin d'aťrer le rťcepteur et le
contrŰleur, il facilite de plus la mise en place de l'accu. |
|
| Ajout du
support pour l'accu de propulsion |
| Nous avons
placť l'accu un peu plus haut, permettant d'aťrer l'installation. Un
lecteur propose un
autre systŤme : n'hťsitez pas ŗ discuter de ce point sur nos forums.
Dťcoupez tout d'abord une planchette en balsa (photo nį12) ou encore
mieux, une piŤce taillťe dans une plaque d'ťpoxy et donc moins
inflammable. Sur celle-ci qui sera maintenue simplement par deux points de
colle et un peu de ruban adhťsif renforcť (afin de la retirer facilement
pour pouvoir accťder au rťcepteur et contrŰleur), il faut placer une
ceinture. Les photos nį10 et 12 montrent trŤs bien ce qu'il faut faire,
la ceinture ťtant collťe et agrafťe. L'accu sera ťquipť d'une bande
velcro ťgalement, ainsi il sera "scratchť" et de plus entourť
par ces bandes velcro. La vidťo
sur l'ASW 15 en position statique montre en gros plan ce systŤme.
Il faudra cependant ajourer la verriŤre comme le montre la photo nį13,
sinon la fermeture sera difficile. Cette modification permettra de reculer
un peu plus l'accu et facilitera quelque peu le centrage du planeur. A
noter qu'il est prťfťrable de coller ce support (deux points suffisent) une fois les essais au
sol rťalisťs, et donc le rťcepteur connectť aux servos... |
|
|
|
|
|
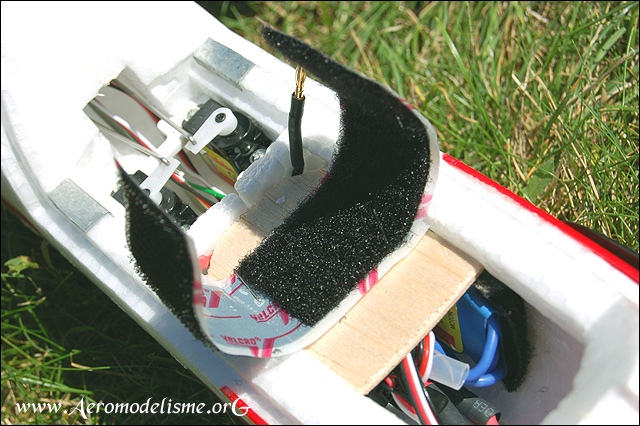
11)
Une gaine a ťtť utilisťe pour les c‚bles des servos et obtenir un peu
de clartť.
12)
Planchette mise en place, ainsi que la ceinture : il ne reste plus qu'ŗ
"scratcher" l'accu Lipo et fermer la boucle.
13)
VerriŤre ajourťe pour ťviter qu'elle ne bute pas sur l'accu, et pour la mettre
facilement en place et sans force. |
|